Робототехника и автоматизация для мониторинга водных ресурсов и предотвращения утечек
Аннотация
Данная статья является обзорной, и отражает наиболее продвинутые исследования проводимыми разными группами исследователей и конструкторов в области инспекции трубопроводов. Автором представлены не только результаты проводимых исследований но и собственные идеи по решению проблем с утечкой жидкости в полипропиленовых пластиковых трубах.
1. Роботизированные технологии для «умных» труб, внутритрубного контроля и ремонта
1.1 Специальное применение
В мире существует серьезная проблема с основой жизни – водой. По прогнозам Организации Объединенных Наций, к 2025 году почти два миллиарда человек будут жить в странах или регионах с абсолютной нехваткой воды. Кроме того, возникают дополнительные стрессы. К ним относятся (i) последствия изменения климата, (ii) растущий спрос на воду со стороны многих сообществ, (iii) утечка водопроводных труб, (iv) неэффективное управление водными ресурсами и (v) неэффективное использование воды. Во всем мире около 25-30% пресной и чистой воды ежегодно при распределении попадает в землю. В развивающихся странах уровень потерь воды может достигать более 40%. Кроме того, результаты таких утечек воды могут привести к материальному ущербу, обрушению улиц и фундаментов, загрязнению воды. Неэффективность управления водными ресурсами увеличивает потери из-за протечек в трубах. Таким образом, сокращение недоходной воды до приемлемого уровня имеет решающее значение. Различные отрасли зависят от воды и серьезно страдают от этих проблем. В их число входят энергетические предприятия, сельское хозяйство, коммерческая и обрабатывающая промышленность, а также жилищное строительство. Подобные проблемы с утечками труб случаются и в газораспределительной отрасли. Например, штат Массачусетс в США теряет более 18% распределяемого природного газа из-за 3000 утечек, происходящих каждый год. Поэтому необходимо разработать и внедрить надежные и эффективные технологии для обеспечения устойчивости водоснабжения.
1.2 Инновационный, выдающийся и необходимый
Наши усилия сосредоточены на разработке передовых роботизированных технологий для труб, их осмотра и ремонта. Наш подход преследует две цели: (i) разработку интеллектуальных труб и (ii) внутритрубных роботов. «Умные трубы» — это трубы, оснащенные инструментами, вычислительными и коммуникационными возможностями. Они собирают и передают информацию, которая включает в себя непрерывный мониторинг состояния и целостности труб, поток продукта внутри трубы, точное место необходимого осмотра, технического обслуживания или ремонта и т. д. Для увеличения соотношение сигнал/шум. Разработан новый сборщик энергии, использующий магнитогидродинамику (МГД), для питания маломощных сенсорных узлов. С другой стороны, внутритрубные роботы — это специализированные роботы, предназначенные для маневрирования внутри трубы и выполнения различных задач. Это отличается от диагностики или ремонта водопроводных труб снаружи. Современные методы реабилитации требуют использования тяжелой техники и человеческого труда. Такие методы отнимают много времени, дороги и неэффективны и требуют прерывания обслуживания. Таким образом, внутритрубным роботам присущ ряд преимуществ. Например, внутренняя поверхность труб обычно более «информативна», чем внешняя. Коррозия, основная причина прорывов труб, чаще возникает внутри труб, чем снаружи. Обнаружение или анализ побочных продуктов коррозии труб, таких как бугорки, с помощью внутритрубного робота может привести к более точным индикаторам дефекта трубы даже до того, как дефект действительно возникнет. Мы успешно разработали как пассивных, так и активных роботов для разнообразных задач в трубе. Активные роботы, которые мы разработали, обладают превосходной маневренностью, которая превосходна в ограниченном пространстве труб.
1.3 Конкретное применение: опишите его ощутимые результаты и причины его значимости.
Разработан ряд внутритрубных роботизированных решений. Разработка таких специализированных роботов и связанных с ними технологий началась в 2008 году. К ним относятся внутритрубный робот для передвижения, внутритрубный робот для проверки, внутритрубный реабилитационный робот, внутритрубный сборщик энергии, бортовые датчики для проверки труб. , подземные сети связи и схемы планирования подземных маршрутов роев роботов. Инспекционный робот, реабилитационный робот и сборщик энергии — три выдающихся примера, которые представляют собой ощутимый прогресс в наших исследованиях. Короче говоря, наш настраиваемый датчик профиля трубы и алгоритмы автономной локализации позволяют роботу-инспектору точно отображать профиль внутри трубы по мере его движения вдоль трубы, включая как препятствия в трубе, так и наличие утечек. Затем операторы могут решить, требует ли сегмент трубы немедленного ремонта или его состояние соответствует эксплуатационным стандартам. Благодаря этой возможности прогнозирования департамент водоснабжения может выполнить восстановление труб до того, как произойдет повреждение, предотвращая крупные расходы, перебои в обслуживании и, что более важно, обеспечивая безопасность и здоровье граждан. После успешной идентификации (потенциальных) опасностей, связанных с трубами, следующим шагом является восстановление дефектной зоны. Здоровье и безопасность потребителей имеют первостепенное значение.
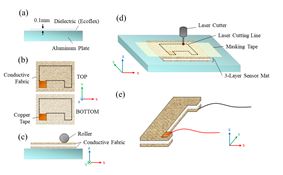
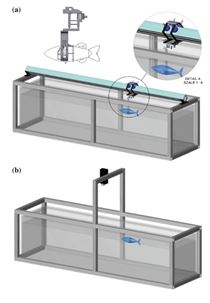
Рис.1 Физическая модель для цикличных тестировании
Например, вот внутритрубный робот, который восстанавливает трубу, удерживает загрязнения, сохраняя при этом водоснабжение. Поддержание водоснабжения и качества воды желательно для клиентов и отделов водоснабжения. Ручная санация труб также является распространенным источником загрязнения трубопроводов, в частности коррозии. Реабилитационный робот MRL призван уменьшить загрязнение, возникающее в результате операции по реабилитации. Он имеет специальную конфигурацию робота и эффектор с мягким концом, позволяющий удерживать как можно больше эксплуатационных отходов. Преимущество очевидно. Имея доступ к месту дефекта изнутри, операторам больше не придется проводить чрезмерные раскопки и прерывать обслуживание. Кроме того, реабилитационные операции гораздо более эффективны. При традиционном восстановлении приходится заменять весь участок трубы, даже если площадь дефекта невелика. Альтернативно, внутритрубный реабилитационный робот может локализовать операцию на этой минимальной площади. Кроме того, роботизированная реабилитация позволяет избежать необходимости вскрытия сегмента трубы. Это открывает замечательные возможности для проведения реабилитации даже без отключения системы водоснабжения.
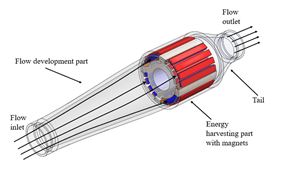
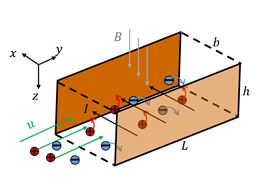
Проектирование и оснащение вспомогательных устройств для внутритрубной эксплуатации является важнейшим шагом на пути всей внутритрубной отрасли. Одним из выдающихся примеров является наш внутритрубный сборщик энергии. Мы разработали накопители энергии на основе магнитогидродинамики (МГД) для маломощных приборов. Это инновационное решение использует поток воды в трубе для выработки электроэнергии. В отличие от традиционных сборщиков энергии, использующих принципы электромагнетизма, пьезоэлектричества и преобразования солнечной энергии, сборщик энергии MHD отличается значительно большей надежностью. Это очень важно в данном случае, поскольку трубопроводная система требует сверхдлительного срока службы. После тщательного анализа и проектирования наш прототип МГД-сборщика энергии демонстрирует потенциал удовлетворения требований к питанию сенсорного узла с микроконтроллерами, датчиками, средствами связи и хранения данных. Эта разработка открывает новый взгляд на сбор энергии и дает большую уверенность в использовании автономных приборов в интеллектуальных трубах следующего поколения.
Некоторые другие избранные работы также заслуживают внимания как важные части работы всей системы. Определение местоположения роботов с помощью GPS или дистанционных датчиков требует большей мощности и зависит от определенных свойств грунта. Таким образом, мы решили локализовать робота, используя только встроенные датчики, такие как IMU, гироскоп и датчики утечек. Измерение соединений труб и моделирование расширенного фильтра Калмана показывают, что ошибка отслеживания составляет около 0,5% от общего расстояния роботизированного контроля. Чтобы лучше отличать утечки от стыков труб и препятствий, датчики были расположены особым образом, чтобы разделить четыре режима деформации материала: одноосное растяжение, изгиб, сжимающее давление и кручение.
1.4 Играет важную роль в жизни человека
Эти события играют важную роль в жизни человека. Около 700 миллионов человек страдают от нехватки воды. Проблема затрагивает 43 страны со всех континентов Земли. Однако нехватка воды становится все хуже и хуже. К 2025 году абсолютная нехватка воды возникнет в округах и регионах, где будут проживать 1,8 миллиарда человек. Две трети населения планеты столкнутся с проблемой нехватки воды. И к 2030 году это соотношение увеличится вдвое. Даже в регионах с достаточным водоснабжением качество воды по-прежнему вызывает большую озабоченность. ВОЗ сообщила, что во всем мире от болезней, связанных с водой, погибает более 3,4 миллиона человек, что делает ее основной причиной болезней и смертности. Разработанные нами интеллектуальные трубы и внутритрубные роботы могут эффективно решить проблему, отслеживая и устраняя утечки, чтобы максимально использовать ограниченные запасы чистой воды, а также отслеживая загрязнение воды в различных формах, чтобы улучшить качество воды и контролировать распространение болезней. Даже в странах с достаточным и гигиеничным водоснабжением наши исследования могут еще больше повысить эффективность использования воды, стимулируя развитие промышленного производства и улучшение жизни людей за счет снижения стоимости водоснабжения.
2. Морская робототехника
2.1 Конкретное применение: Мониторинг и прогнозирование состояния океана и морской жизни имеют решающее значение для здоровья нашей планеты. Сохранение и обновление морской жизни для обеспечения более здоровой планеты.
Как говорится, здоровье океана – наше здоровье. Океаны, занимающие более 70% поверхности нашей планеты, являются золотыми приисками природных ресурсов. По мере развития технологий растет и наш шаг к глубокой воде. Подводные операции, такие как разведка нефтяных скважин, мониторинг разливов нефти, тактическая разведка, предполагают стратегическое соревнование между правительствами. С помощью гидрологического мониторинга океана, такого как соленость, температура воды и растворенный кислород, ученые могут прогнозировать будущее состояние различных видов. С другой стороны, отслеживание биологической информации о водных обитателях также является точным исследованием для ученых, позволяющим наблюдать за здоровьем океана или даже за здоровьем нашей планеты.
Естественная среда обитания в океане еще более изобретательна и вдохновляюща, чем океан. Например, голубой тунец может развивать скорость ~74 км/ч, что является чрезвычайно высокой скоростью даже по сравнению с современными кораблями, оснащенными паровыми или ядерными двигателями. Выносливость атлантического лосося позволяет ему преодолевать более 10 000 км, прежде чем вернуться домой. То, как естественным образом образовавшиеся водные обитатели достигают таких впечатляющих инженерных результатов, имеет значительную исследовательскую ценность. Чтобы изучить естественное состояние водных обитателей и защитить наш драгоценный океан, мы, как наблюдатели, должны сливаться с фоном. Наше решение – выглядеть и плавать как рыба.
2.2 Инновационный, выдающийся и незаменимый
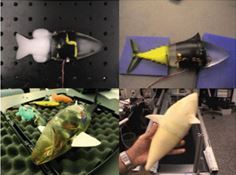
Наша работа была сосредоточена на разработке биомиметических роботов для мониторинга здоровья океана и морской жизни в их естественном состоянии. MRL является первым, кто применил и формализовал основные принципы подхода «неприведенного в действие мягкого тела» к рыбоподобным роботам. Подход основан на двух принципах: использовании мягких тел вместо традиционных жестких механизмов и обеспечении динамики пассивного механизма для достижения целевых движений. Благодаря аналитическому моделированию желаемого плавательного движения и объединению его с вязкоупругой динамикой мягкого тела в жидкости мы можем оптимизировать геометрические и материальные свойства, такие как модуль мягкого материала и распределение вязкости тела рыбы, а также задать распределение срабатывания. , включая номер привода, местоположение, величину и частоту. Наша методология проектирования универсальна. Мы успешно применили эту конструкцию к телам, похожим на гусеницы и грозообразные, а затем перенесли их на гораздо более сложные формы тел, такие как батоидные роботы, скаты и тела саламандр. Наш робот в полной мере использует преимущества мягких материалов и плавательной позы рыб, что позволяет нам значительно снизить механическую сложность робота, одновременно генерируя более естественные движения, чем у ранее предложенных роботов. Наша исследовательская работа также стала пионером в определении характеристик и изготовлении мягких материалов, таких как силиконовая резина.
2.3 Специальное применение
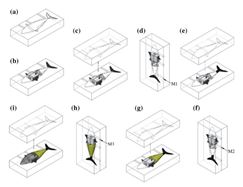
Было разработано и испытано множество роботов-рыб. Благодаря нашей универсальной методологии проектирования, описанной выше, мы смогли предложить и реализовать мягких роботов-рыб с различными формами тела. В одной из наших исследовательских статей мы подробно описали развитие карангиформной рыбы. Несмотря на кинематические и динамические уравнения, мы также поставили задачу оптимизации с ограничениями, например минимизацию количества исполнительных механизмов, амплитуды срабатывания или потребления энергии. Доработанная конструкция представляет собой жесткую пластину с сервоприводом, заключенную в вязкоупругий корпус. Чтобы справиться с изготовлением этой уникальной конструкции, мы изобрели метод последовательного формования. Прототип мягкой роботизированной рыбы был подвергнут экспериментам в лабораторных условиях. Наша система сбора данных отслеживает траектории нескольких точек на теле робота, собирает данные о тяге, скорости и визуализирует вихревой поток вблизи рыбы. Кроме того, мы обобщаем работу, чтобы ловить рыбу с еще более сложной геометрией. Одна из наших известных работ — прототип ската. Мы провели полевые испытания робота-ската в Сингапуре.
2.4 Играет важную роль в жизни человека
Эти события играют важную роль в жизни человека. Наши разработки в области мягких роботизированных рыб, вдохновленных биотехнологиями, играют важную роль в жизни человека. Ученые и инженеры теперь могут изучать и наблюдать за морской жизнью более внимательно и тихо, чем когда-либо прежде. Потенциально, с помощью наших роботов с естественными движениями мы сможем манипулировать поведением морских обитателей или даже выступать в роли лидера. Такие приложения включают спасение рыб от экологической катастрофы или балансировку региональных популяций различных видов. С инженерной точки зрения недоработанное природное явление и связанное с ним управление, изготовление и механическое проектирование вдохновляют на соответствующие исследования. Эффективная методология движения рыбы и уникальное использование мягкого материала также являются эвристикой для других локомоций морских роботов или конструкций подводных транспортных средств. Это мотивировало одного из внутритрубных роботов MRL для передвижения в более позднем исследовании.
Ссылки
You Wu; Elizabeth Mittmann; Crystal Winston; Kamal Youcef-Toumi
A Practical Minimalism Approach to In-pipe Robot Localization
In: 2019 American Control Conference (ACC), pp. 3180-3187, IEEE IEEE, 2019, ISBN: 978-1-5386-7926-5.
S Mekid; D Wu; R Hussain; K Youcef-Toumi
Channel modeling and testing of wireless transmission for underground in-pipe leak and material loss detection
In: International Journal of Distributed Sensor Networks, vol. 13, no. 11, pp. 1550147717744715, 2017, ISSN: 1550147717744715.
You Wu; Antoine Noel; David Donghyun Kim; Kamal Youcef-Toumi; Rached Ben-Mansour
Design of a maneuverable swimming robot for in-pipe missions
In: 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 4864-4871, IEEE IEEE, 2015, ISBN: 978-1-4799-9994-1.
Dimitris Chatzigeorgiou; You Wu; Kamal Youcef-Toumi; Rached Ben-Mansour
MIT Leak Detector: An in-pipe leak detection robot
In: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 2091-2091, IEEE IEEE, 2014, ISBN: 978-1-4799-3685-4.
Dimitris Chatzigeorgiou; Kamal Youcef-Toumi; Rached Ben-Mansour
Modeling and analysis of an in-pipe robotic leak detector
In: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 3351-3357, IEEE, 2014, ISBN: 978-1-4799-3685-4.
Dimitris Chatzigeorgiou; Kamal Youcef-Toumi; Rached Ben-Mansour
Detection estimation algorithms for in-pipe leak detection
In: 2014 American Control Conference, pp. 5508-5514, 2014, ISBN: 978-1-4799-3274-0.
Dalei Wu; Dimitris Chatzigeorgiou; Kamal Youcef-Toumi; Samir Mekid; Rached Ben-Mansour
Channel-Aware Relay Node Placement in Wireless Sensor Networks for Pipeline Inspection
In: Proceedings of the American Control Conference (2013), ACC ACC, 2014, ISSN: 1536-1276.
Apoorva Santhosh; Amro M Farid; Kamal Youcef-Toumi
Design and Evaluation of an In-Pipe Leak Detection Sensing Technique Based on Force Transduction
In: ASME 2012 International Mechanical Engineering Congress and Exposition, IEEE IEEE, 2013, ISBN: 978-0-7918-4520-2.
Dimitris Chatzigeorgiou; You Wu; Kamal Youcef-Toumi; Rached Ben-Mansour
In: 2013 IEEE/RSJ International Conference onIntelligent Robots and Systems (IROS), pp. 246-251, IEEE IEEE, 2013.
Atia E Khalifa; Rached Ben-Mansour; Kamal Youcef-Toumi; Changrak Choi
Characterization of In-Pipe Acoustic Wave for Water Leak Detection
In: ASME 2011 International Mechanical Engineering Congress and Exposition, pp. 995-1000, ACC ACC, 2012, ISBN: 978-0-7918-5494-5.
C Choi; D Chatzigeorgiou; R Ben-Mansour; K Youcef-Toumi
Design and analysis of novel friction controlling mechanism with minimal energy for in-pipe robot applications
In: 2012 IEEE International Conference on Robotics and Automation, pp. 4118-4123, IEEE IEEE, 2012, ISBN: 978-1-4673-1405-3.
Dimitris M Chatzigeorgiou; Atia E Khalifa; Kamal Youcef-Toumi; Rached Ben-Mansour
An In-Pipe Leak Detection Sensor: Sensing Capabilities and Evaluation
In: ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. 481-489, ACC ACC, 2012, ISBN: 978-0-7918-5480-8.
Dimitris M Chatzigeorgiou; Kamal Youcef-Toumi; Atia E Khalifa; Rached Ben-Mansour
Analysis and Design of an In-Pipe System for Water Leak Detection
In: ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. 1007-1016, ASME ASME, 2012, ISBN: 978-0-7918-5482-2.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}